UPDATE: The IsaacSim setup is available for demonstration purposes only. There will not be a challenge involving this platform.
IsaacSim Setup
Isaac Sim Version 5.1.0
and the corresponding
Surgical Robotics Challenge Assets (ICRA-Challenge-2026 branch)
are installed on the IsaacSim PC in the competition area.
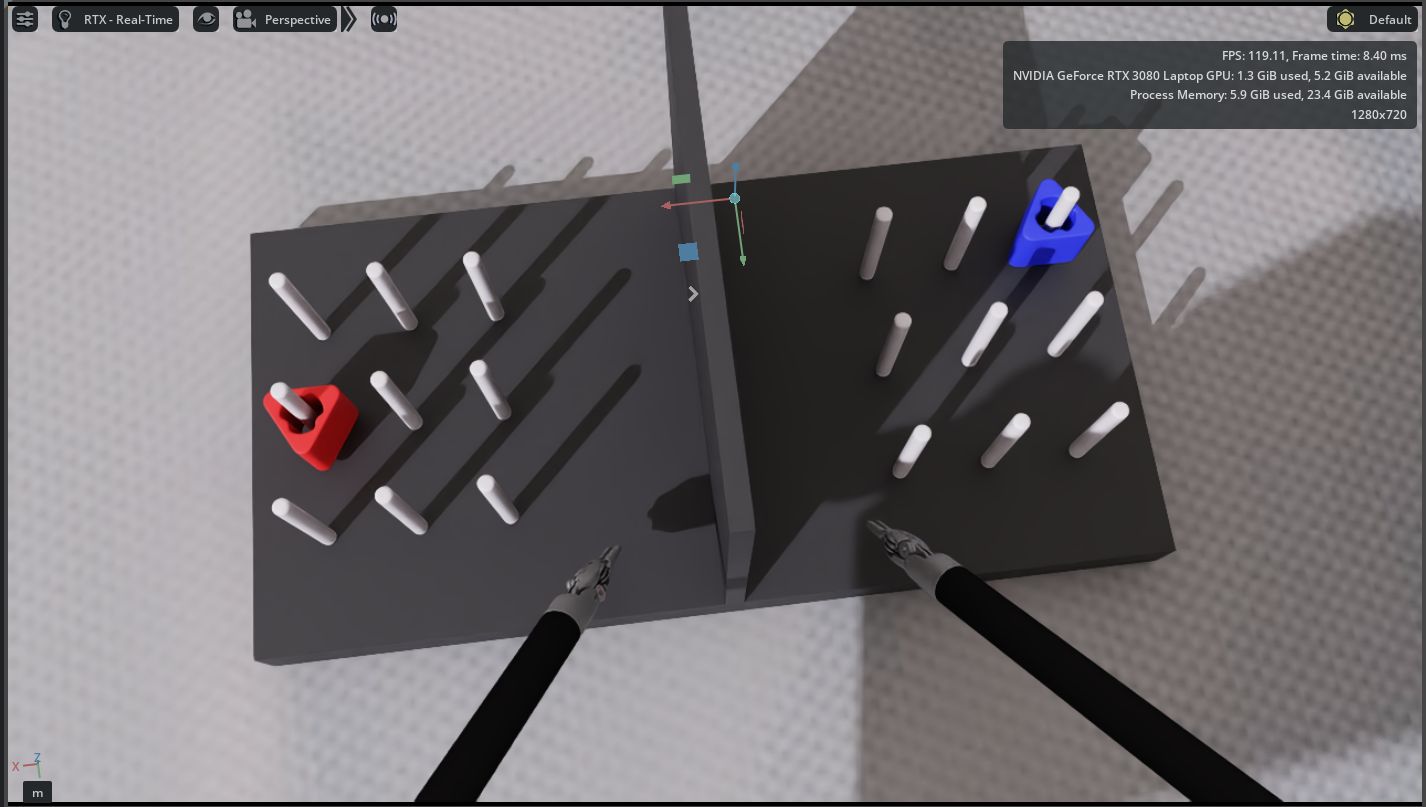
The simulation environment contains two da Vinci large needle drivers and a pegboard with posts on either side of a large wall. There are two pegs, each with a different color (blue or red).
The virtual stereo camera emulates the OAK-D-SR camera used in Physical dVRK setup. In particular, the stereo baseline is 20 mm, the FOV is 80 deg (H), 55 deg (V), and the resolution is 1280 x 800.
Human Teleoperation Peg Transfer Challenge
No preparation is necessary – please come to the competition area and give it a try!
You will use a Quest 3 HMD, with hand controllers, as the interface to control the simulated PSMs.
Autonomous Peg Transfer Challenge
Competitors for the Autonomous Peg Transfer Challenge should develop algorithms that interface with the IsaacSim simulator, via the ROS2 API, using one of the following options:
Option 1: Run your algorithm on your own computer
Your computer should be running ROS2 Jazzy and can interface to the IsaacSim computer via a local area connection.
Option 2: Run your algorithm on the IsaacSim computer
We will create a separate login account for your team, using the account name requested on the registration form.
Following are the specifications for the IsaacSim computer (Alienware laptop):
| CPU | Intel i7 11th gen 2.3GHz 8 cores, 16 threads |
| GPU | RTX 3080 8GB |
| RAM | 32GB |
Packages Installed: ROS2, IsaacSim, Surgical Robotics Challenge Assets
Offline Development and Testing
If you wish to create the IsaacSim environment on your own computer, please follow the detailed instructions
here (ICRA-Challenge-2026 branch)
We recommend using ROS2 on Ubuntu 24.04.